Comme nous venons de le voir, le but de la tomographie par rayons
X est de trouver la fonction d'atténuation
f![]() x, y
x, y![]() . Pour
atteindre cet objectif, on effectue tout d'abord des mesures qui fournissent
des équations mathématiques faisant intervenir
f
. Pour
atteindre cet objectif, on effectue tout d'abord des mesures qui fournissent
des équations mathématiques faisant intervenir
f![]() x, y
x, y![]() .
Ensuite, on résout ces équations pour obtenir
f
.
Ensuite, on résout ces équations pour obtenir
f![]() x, y
x, y![]() .
.
Dans les scanners à rayons X, l'information accessible sur
f![]() x, y
x, y![]() se présente sous la forme d'intégrales de
f
se présente sous la forme d'intégrales de
f![]() x, y
x, y![]() sur
différentes droites du plan
sur
différentes droites du plan
![]() x, y
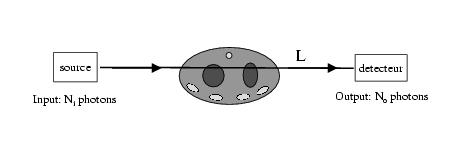
x, y![]() . On parle d'intégrales
de lignes. La figure 11.3 illustre la situation. Conceptuellement,
on utilise une source de rayons X et un détecteur (compteur) de photons.
La source envoie un faisceau de Ni photons dans la direction
du détecteur au travers de la coupe, on détermine le nombre No
de photons qui passent, puis, par le biais de la relation
. On parle d'intégrales
de lignes. La figure 11.3 illustre la situation. Conceptuellement,
on utilise une source de rayons X et un détecteur (compteur) de photons.
La source envoie un faisceau de Ni photons dans la direction
du détecteur au travers de la coupe, on détermine le nombre No
de photons qui passent, puis, par le biais de la relation
![]() N = - f N
N = - f N ![]() l,
on trouve
l,
on trouve
 f f f f |
(11.1) |
Pour calculer (reconstruire)
f![]() x, y
x, y![]() de façon exacte,
nous verrons que les intégrales de lignes de
f
de façon exacte,
nous verrons que les intégrales de lignes de
f![]() x, y
x, y![]() doivent être connues pour toutes les droites qui passent au travers
de la coupe étudiée.
doivent être connues pour toutes les droites qui passent au travers
de la coupe étudiée.
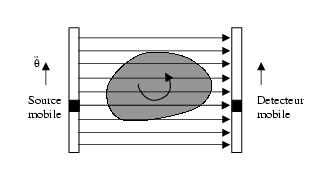
Il y a deux façons différentes de collecter les mesures sur l'ensemble des droites passant au travers de la coupe: en géométrie parallèle (voir la figure 11.4) et en géométrie en éventail (voir la figure 11.5).
En géométrie parallèle, les mesures
log![]() Ni/No
Ni/No![]() sont réalisées sur des ensembles de droites parallèles. On déplace
la source et le détecteur dans une direction donnée
sont réalisées sur des ensembles de droites parallèles. On déplace
la source et le détecteur dans une direction donnée
![]() pour obtenir les mesures sur toutes les droites perpendiculaires au
vecteur
pour obtenir les mesures sur toutes les droites perpendiculaires au
vecteur
![]() . Ensuite, on applique une rotation à l'ensemble
source-détecteur afin d'obtenir des nouvelles mesures en répétant
le mouvement de translation. Le mouvement de rotation s'effectue sur
un intervalle angulaire de longueur
. Ensuite, on applique une rotation à l'ensemble
source-détecteur afin d'obtenir des nouvelles mesures en répétant
le mouvement de translation. Le mouvement de rotation s'effectue sur
un intervalle angulaire de longueur ![]() .
.
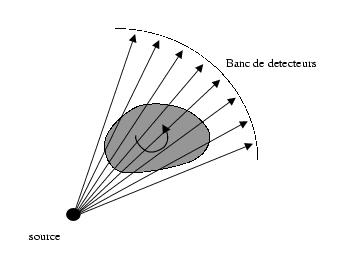
En géométrie en éventail, on utilise tout un banc de détecteurs. La
source envoie simultanément ses rayons en direction de tous les détecteurs
de ce banc de telle sorte que l'on obtient pour une position angulaire
donnée tout un jeu de mesures correspondant à des droites formant
un éventail. Pour couvrir toutes les droites du plan, on considère
généralement un mouvement de rotation de l'ensemble source-banc sur
un intervalle de longueur 2![]() , ce qui, notons-le, conduit à une
redondance d'ordre 2 dans les mesures. Par rapport à la géométrie
parallèle, on observe que la géométrie en éventail permet une acquisition
plus rapide des données, grâce à la suppression du mouvement de translation.
, ce qui, notons-le, conduit à une
redondance d'ordre 2 dans les mesures. Par rapport à la géométrie
parallèle, on observe que la géométrie en éventail permet une acquisition
plus rapide des données, grâce à la suppression du mouvement de translation.
Conceptuellement, l'appareillage requis pour la géométrie en éventail
est plus coûteux que celui requis pour la géométrie parallèle. Toutefois,
la géométrie en éventail est préférée à la géométrie parallèle car
elle permet d'acquérir les mesures plus rapidement. La vitesse d'acquisition
des mesures est de fait un facteur très important en tomographie.
Dans la discussion ci-dessus, nous avons fait l'hypothèse implicite
que la fonction
f![]() x, y
x, y![]() ne varie pas au cours du temps.
Lorsque le patient bouge durant l'acquisition des mesures (ne serait-ce
qu'en respirant), l'expression de
f
ne varie pas au cours du temps.
Lorsque le patient bouge durant l'acquisition des mesures (ne serait-ce
qu'en respirant), l'expression de
f![]() x, y
x, y![]() peut changer
d'une intégrale de ligne à une autre et la qualité des images obtenues
est alors médiocre. Les scanners actuels utilisent la géométrie en
éventail et peuvent collecter les mesures pour une coupe donnée en
moins de 750
peut changer
d'une intégrale de ligne à une autre et la qualité des images obtenues
est alors médiocre. Les scanners actuels utilisent la géométrie en
éventail et peuvent collecter les mesures pour une coupe donnée en
moins de 750
![]() ms
ms![]() , de telle sorte que le patient ne
bouge pratiquement pas.
, de telle sorte que le patient ne
bouge pratiquement pas.
Pour la formulation mathématique du problème de reconstruction de
f![]() x, y
x, y![]() à partir de ses intégrales de lignes, notons
qu'il est plus facile de travailler en géométrie parallèle, comme
effectué ci-après.
à partir de ses intégrales de lignes, notons
qu'il est plus facile de travailler en géométrie parallèle, comme
effectué ci-après.