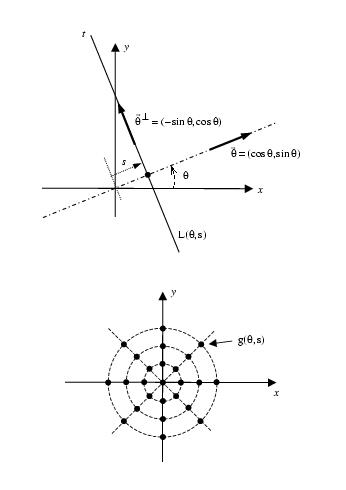
Comme illustré à la figure 11.6, nous décrivons les droites
dans le plan
![]() x, y
x, y![]() à l'aide de deux coordonnées:
s
à l'aide de deux coordonnées:
s ![]()
![]() -
- ![]() , +
, + ![]()
![]() et
et
![]()
![]()
![]() 0, 2
0, 2![]()
![]() . La droite définie par s et
. La droite définie par s et
![]() est notée
L
est notée
L![]()
![]() , s
, s![]() tandis que la mesure
le long de la droite
L
tandis que la mesure
le long de la droite
L![]()
![]() , s
, s![]() est notée
g
est notée
g![]()
![]() , s
, s![]() .
Notons que
.
Notons que ![]() et s ne sont pas des coordonnées polaires:
lorsque
et s ne sont pas des coordonnées polaires:
lorsque
![]() et
et
![]() sont tels que
sont tels que
![]()
![]()
![]() + k
+ k ![]() ,
on a
L
,
on a
L![]()
![]() , s = 0
, s = 0![]()
![]() L
L![]()
![]() , s = 0
, s = 0![]() .
Notons aussi que
L
.
Notons aussi que
L![]()
![]() +
+ ![]() , - s
, - s![]()
![]() L
L![]()
![]() , s
, s![]() et donc
g
et donc
g![]()
![]() +
+ ![]() , - s
, - s![]() = g
= g![]()
![]() , s
, s![]() .
.
Mathématiquement parlant, on dit que
g![]()
![]() , s
, s![]() est
un échantillon de la transformée de RADON de
f
est
un échantillon de la transformée de RADON de
f![]() x, y
x, y![]() . (La transformée de RADON de
f
. (La transformée de RADON de
f![]() x, y
x, y![]() est la fonction qui associe à chaque droite du plan
est la fonction qui associe à chaque droite du plan
![]() x, y
x, y![]() ,
l'intégrale de
f
,
l'intégrale de
f![]() x, y
x, y![]() sur cette droite.) On note cette
transformée sous la forme
sur cette droite.) On note cette
transformée sous la forme
| g |
(11.2) |
En pratique, l'ensemble des mesures
g![]()
![]() , s
, s![]() obtenues
pour une valeur fixée de
obtenues
pour une valeur fixée de ![]() avec
s
avec
s ![]()
![]() -
- ![]() , +
, + ![]()
![]() est appelé projection de
f
est appelé projection de
f![]() x, y
x, y![]() ,
tandis que l'ensemble des mesures
g
,
tandis que l'ensemble des mesures
g![]()
![]() , s
, s![]() obtenues
pour
s
obtenues
pour
s ![]()
![]() -
- ![]() , +
, + ![]()
![]() et
et
![]()
![]()
![]() 0, 2
0, 2![]()
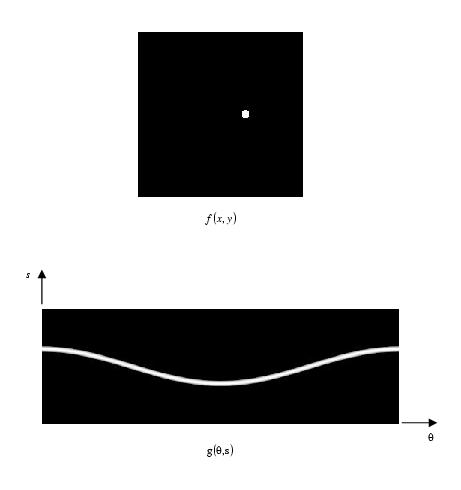
![]() est appelé sinogramme. On parle de sinogramme
parce que les données associées au point objet
f
est appelé sinogramme. On parle de sinogramme
parce que les données associées au point objet
f![]() x, y
x, y![]() =
= ![]()
![]() x - x0
x - x0![]()
![]()
![]() y - y0
y - y0![]() sont uniquement non-nulles le long de la sinusoïde
s = x0cos
sont uniquement non-nulles le long de la sinusoïde
s = x0cos![]() + y0sin
+ y0sin![]() dans le domaine
dans le domaine
![]()
![]() , s
, s![]() . L'ensemble des mesures obtenues
pour une fonction quelconque
f
. L'ensemble des mesures obtenues
pour une fonction quelconque
f![]() x, y
x, y![]() peut donc s'exprimer
comme une somme de sinusoïdes en coordonnées
peut donc s'exprimer
comme une somme de sinusoïdes en coordonnées
![]()
![]() , s
, s![]() .
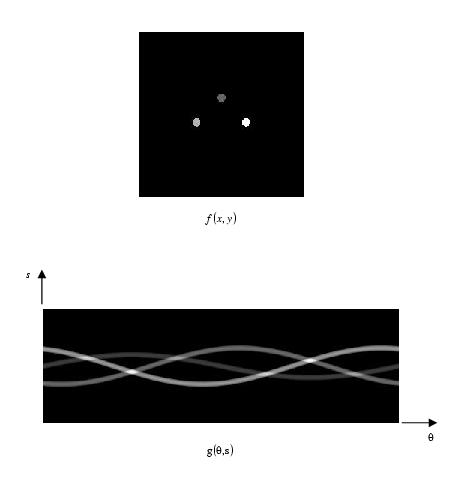
Les figures 11.7, 11.8 et 11.9 illustrent
les sinogrammes que l'on peut obtenir pour un point
objet, trois points objet, puis le fantôme de SHEPP
et LOGAN qui est largement utilisé en pratique pour tester
la stabilité numérique des algorithmes de reconstruction.
.
Les figures 11.7, 11.8 et 11.9 illustrent
les sinogrammes que l'on peut obtenir pour un point
objet, trois points objet, puis le fantôme de SHEPP
et LOGAN qui est largement utilisé en pratique pour tester
la stabilité numérique des algorithmes de reconstruction.
Il existe trois méthodes analytiques pour reconstruire
f![]() x, y
x, y![]() à partir de ses intégrales de lignes: (i) la méthode directe de FOURIER,
(ii) la méthode du filtrage de la rétroprojection,
et (iii) la méthode de rétroprojection des projections filtrées. D'un
point de vue pratique, la plus intéressante des méthodes est la troisième
car elle est numériquement plus stable. Toutefois, les trois méthodes
seront étudiées ci-après, vu que chaque approche permet de mieux comprendre
la suivante.
à partir de ses intégrales de lignes: (i) la méthode directe de FOURIER,
(ii) la méthode du filtrage de la rétroprojection,
et (iii) la méthode de rétroprojection des projections filtrées. D'un
point de vue pratique, la plus intéressante des méthodes est la troisième
car elle est numériquement plus stable. Toutefois, les trois méthodes
seront étudiées ci-après, vu que chaque approche permet de mieux comprendre
la suivante.