|
Les systèmes de vision industrielle sont constitués d'un certain nombre d'éléments matériels et logiciels dont on doit tenir compte et choisir judicieusement au moment de la conception, en fonction des exigences et contraintes de l'application visée.
Considérons ces éléments dans leur ordre d'apparition le long de la chaîne de formation de l'image (cf. figures 13.19 et 13.20).
En premier lieu, il est important de garder en mémoire qu'une image résulte de l'interaction entre la lumière émise par une ou plusieurs sources d'éclairage, et la surface des objets à inspecter et de leur environnement, qui réfléchissent cette lumière vers l'observateur. L'effet résultant est donc bien la combinaison de la distribution de la lumière incidente et des propriétés de réflectance des surfaces. De façon schématique, on peut dire qu'une image permet de voir les sources lumineuses qui se réfléchissent sur la scène observée.
Cette remarque permet de comprendre combien le choix des sources lumineuses et de leur disposition est un élément essentiel du succès d'une solution. Si l'éclairage est bien choisi, les caractéristiques utiles seront faciles à mesurer; si l'éclairage est déficient, l'application échouera. En général, on ne peut pas agir sur les propriétés des objets à inspecter. On peut par contre ajuster les sources lumineuses à volonté.
À l'heure actuelle, plusieurs types de sources d'éclairage ont la faveur (cf. figure 13.21):
|
Dans la plupart des cas, on fabrique des sources lumineuses de formes variées (plaques, barrettes, anneaux, cylindres, sphères, cloches, ...) soit par assemblage de plusieurs ampoules, soit en utilisant des fibres optiques comme guides de lumière. Ces différentes dispositions permettent de distribuer la lumière de la façon la plus adéquate.
On distingue l'éclairage directionnel où la direction d'incidence de la lumière est bien définie, de façon telle que des ombres portées apparaissent nettement, et l'éclairage diffus, souvent obtenu par réflexion ou transmission sur des surfaces mates, qui atténue les ombres et adoucit le rendu.
La position de l'éclairage par rapport à l'observateur permet d'obtenir des effets variés. Lorsque les objets sont éclairés dans une direction proche de l'observateur, les surfaces sont vues avec leur couleur habituelle et le contraste qu'elles créent est lié à leur nature. On parle alors d'éclairage en champ clair. Le cas extrême est obtenu au moyen d'éclairages coaxiaux (la lumière est amenée sur l'axe optique au moyen d'un miroir semi-réfléchissant), qui ont la propriété d'éviter toute zone d'ombre dans l'image.
Lorsque les objets sont éclairés selon une incidence rasante, les ombres portées par les accidents et la microstructure des surfaces donnent une apparence très différente qui fait ressortir le relief et la texture des objets plutôt que leur teinte. On parle alors de champ sombre.
Lorsque les objets sont éclairés par l'arrière, seule leur silhouette est perceptible et elle se détache avec un fort contraste sur un fond clair. On parle dans ce cas d'ombroscopie. Seule la forme des objets apparaît.
Enfin, certaines applications spéciales, telles que le relevé tridimensionnel de surfaces, nécessitent des procédés spéciaux, dits d'éclairage structuré, qui consistent à éclairer sélectivement en projetant des motifs géométriques judicieusement choisis. Par exemple, l'emploi d'un ``plan laser'' permet de tracer des lignes sur les objets et d'en déduire la forme spatiale en les observant de biais.
Il paraît naturel d'éclairer les objets en lumière blanche, puisque c'est ainsi que nous observons le monde qui nous entoure. Lorsque l'on utilise des caméras en noir et blanc, il est cependant fréquent d'éclairer en lumière rouge, car cette gamme de longueur d'onde correspond à une plage où la sensibilité du silicium à la lumière est meilleure. D'autres couleurs sont parfois utilisées pour maximiser le contraste ou pour d'autres raisons. On utilise également le rayonnement infrarouge qui a l'avantage d'être invisible à l'oeil humain.
L'expérience montre que l'apparence des objets vus par un système d'imagerie peut s'écarter fortement de notre expérience de tous les jours, en particulier en raison des procédés d'éclairage, et il est bon d'en connaître toutes les possibilités.
Le choix correct de l'optique dont la caméra est équipée est également crucial. Il détermine pour une large part la qualité de l'image en termes de netteté, contraste et absence de déformations. Il est soumis à des contraintes telles que l'encombrement maximum permis, qui tient compte de la taille de l'objectif et de la distance d'observation. On retiendra que les optiques courantes sont loin d'égaler les performances de l'oeil humain qui dispose notamment d'une large faculté d'auto-adaptation (mise au point sur une large gamme de distances, auto-focalisation, auto-ajustement d'ouverture, ...).
Les caméras industrielles sont munies d'objectifs similaires à ceux utilisés en photographie, à une ou plusieurs lentilles. Les paramètres essentiels qui guident leur choix sont le grossissement, le pouvoir séparateur (mesuré en nombre de lignes résolues par unité de longueur) qui fixe la finesse des détails mesurables, la distance d'observation qui détermine l'encombrement, et la profondeur de champ (gamme d'éloignements entre lesquels l'image est nette). Des caractéristiques secondaires tels que l'absence de distorsion géométrique ou chromatique font la différence entre optiques de mauvaise et bonne qualité.
Les objectifs peuvent avoir des distances focales fixes ou ajustables (on parle alors de zooms). Les focales courantes s'étendent de courtes distances (quelques millimètres) dans le cas d'objectifs macrophoto ou de grand angles, à de longues distances (quelques décimètres) dans le cas des téléobjectifs. A l'extrême, on trouve les optiques télécentriques, correspondant à une focale infinie, qui donnent une image de la même taille que l'objet. Les petites focales correspondent à un plus large champ visuel mais donnent lieu à plus d'aberrations et distorsions optiques.
Les objectifs sont normalement munis d'un obturateur mécanique, qui permet d'ajuster la quantité de lumière entrante pour régler la luminosité de l'image. Plus l'obturateur est fermé, meilleure est la profondeur de champ, et vice-versa. Comme nous le verrons, des moyens électroniques intégrés à la caméra permettent également d'ajuster la luminosité et le contraste.
Parfois, des éléments optiques additionnels sont utilisés: miroirs et prismes pour modifier le chemin optique pour réduire l'encombrement, filtres polarisants pour éliminer les reflets, écrans pour éliminer la lumière parasite, ...
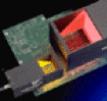
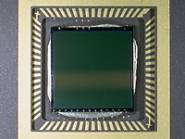
Les caméras industrielles actuelles sont constituées par des boîtiers compacts sur lesquels se vissent les objectifs et qui contiennent un capteur photosensible logé derrière un verre protecteur. Le rôle du capteur est de transformer la quantité de lumière incidente en une charge électrique par effet photo-électrique, et de convertir cette charge en une grandeur électrique mesurable. Les capteurs sont décomposés en petites cellules jointives indépendantes, qui reçoivent chacune une petite partie de l'image, c'est-à-dire un pixel.
Dans la grande majorité des cas, les capteurs sont réalisés au moyen de la technologie CCD (Charge Coupled Device), qui permet de véhiculer les charges accumulées dans les éléments sensibles au moyen de registres à décalage. Le courant correspondant est converti en une tension qui est mise en forme et combinée avec des impulsions de contrôle pour constituer un signal vidéo. Une autre technologie entre en concurrence avec la précédente: il s'agit de l'intégration CMOS (Complementary Metal-Oxyde semiconductors), qui permet de réaliser des capteurs avec une technologie très proche de celle des mémoires RAM (accès aléatoire aux pixels) tout en profitant du faible coût de fabrication de ce type de circuits.
On distingue deux grandes familles de caméras, selon la disposition des éléments sensibles:
Les caméras plus récentes sont dites numériques car elles délivrent directement un signal numérisé véhiculé sur une liaison série ou parallèle. Dans le cas de la liaison parallèle, le nombre de bits à transmettre (bits de données, signaux de contrôle et de synchronisation) peuvent requérir un nombre de fils prohibitif. Dans le cas de liaisons en série, la fréquence de transmission doit par contre être très élevée.
Que les caméras délivrent un signal analogique ou numérique, le contenu de l'image doit être transféré dans la mémoire de travail d'une unité de traitement. Ce transfert est réalisé par un hardware d'interface spécialisé, appelé frame grabber, qui joue plusieurs rôles. Il récolte les signaux en provenance de la caméra, essentiellement liés au contenu de l'image et à la synchronisation, et les met en forme pour le processeur. S'il s'agit d'un signal analogique, celui-ci est échantillonné et numérisé; s'il s'agit d'un signal numérique en série, il est ``désérialisé''; s'il s'agit d'un signal numérique en parallèle, il est pratiquement transmis tel quel.
Après éventuelle numérisation, les pixels sont stockés dans des mémoires tampons intermédiaires. Enfin, le contenu de ces mémoires est transféré vers la mémoire principale par blocs, pour perturber le moins possible le fonctionnement du processeur en monopolisant le bus d'accès mémoire.
Éventuellement, le frame grabber est capable de réaliser des traitements élémentaires tels que des filtrages spatiaux, l'étirement de la dynamique (gain et offset), la séparation des couleurs, ... Ces traitements sont la plupart du temps appliqués au signal analogique.
Enfin, les modèles haut de gamme peuvent être munis de processeurs dédiés qui peuvent appliquer des pré-traitements ``au vol'' avant de délivrer l'image numérique. On peut citer par exemple la compression, la correction de la balance des blancs, la correction de non-uniformité de réponse du capteur, ...
Par le passé, les systèmes informatiques à microprocesseur ne disposaient pas de suffisamment de puissance de calcul pour être capables de servir à eux seuls les besoins des applications de traitement d'image. Il suffit de se rappeler qu'une image de taille standard comporte 640×480 ou 768×576 pixels codés sur un ou trois bytes, et que les images sont produites à la cadence de 25 par seconde. Cela représente un flux de données de 7, 7 [Mbytes/s] à 33 [Mbytes/s]!
Pour cette raison, de nombreux systèmes ont été construits sur base de hardware spécialisé, combinant des processeurs à usage général, des processeurs de traitement du signal (DSPs) et des unités arithmétiques sur mesure. L'évolution spectaculaire de la puissance de traitement des ordinateurs personnels (PCs) les a rendus tout à fait aptes à remplir ce rôle.
A l'heure actuelle, la majorité des systèmes industriels sont donc conçus sur base de PCs industriels ou non, qui abritent des frame grabbers. Certains constructeurs fournissent des systèmes propriétaires ``tous faits'', souvent construits autour d'un PC simplifié.
Profitant des progrès de la miniaturisation, certains fabricants sont parvenus à combiner dans un seul boîtier compact les fonctions de caméra, carte d'acquisition et unité de traitement. Les caméras intelligentes ainsi réalisées sont programmables et ne délivrent pas d'image: elles fournissent directement les résultats du traitement, comme par exemple le contenu d'un code à barres ou un diagnostic d'inspection.